グリーンエネルギー技術の創出
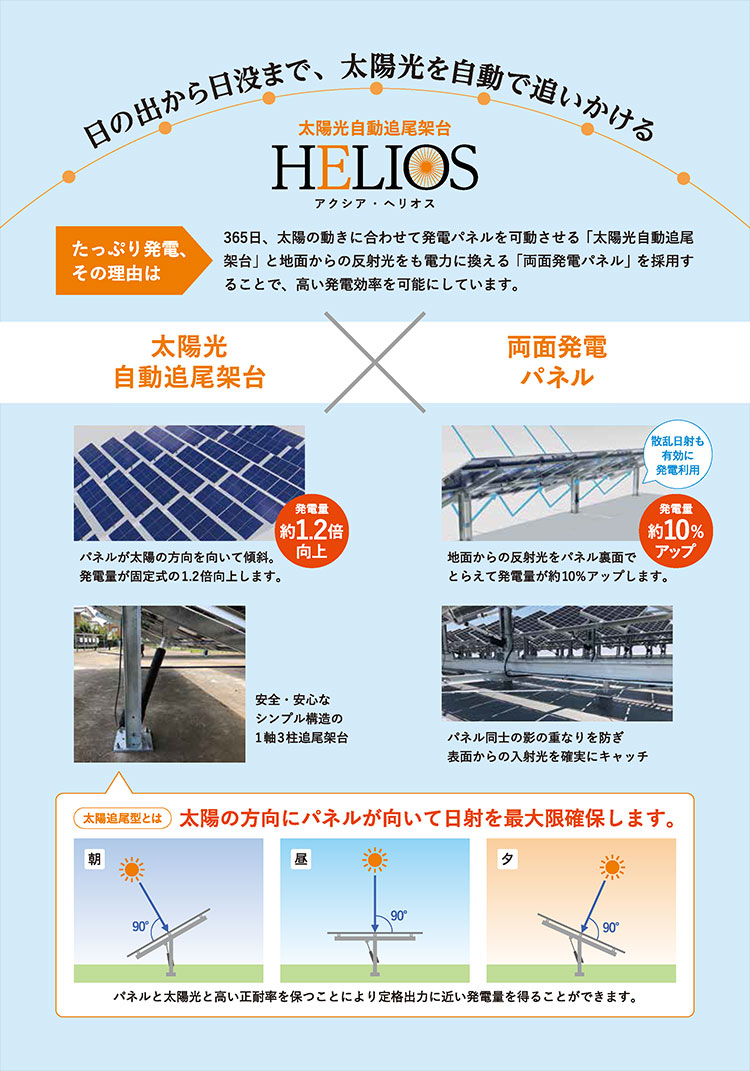
太陽光自動追尾架台
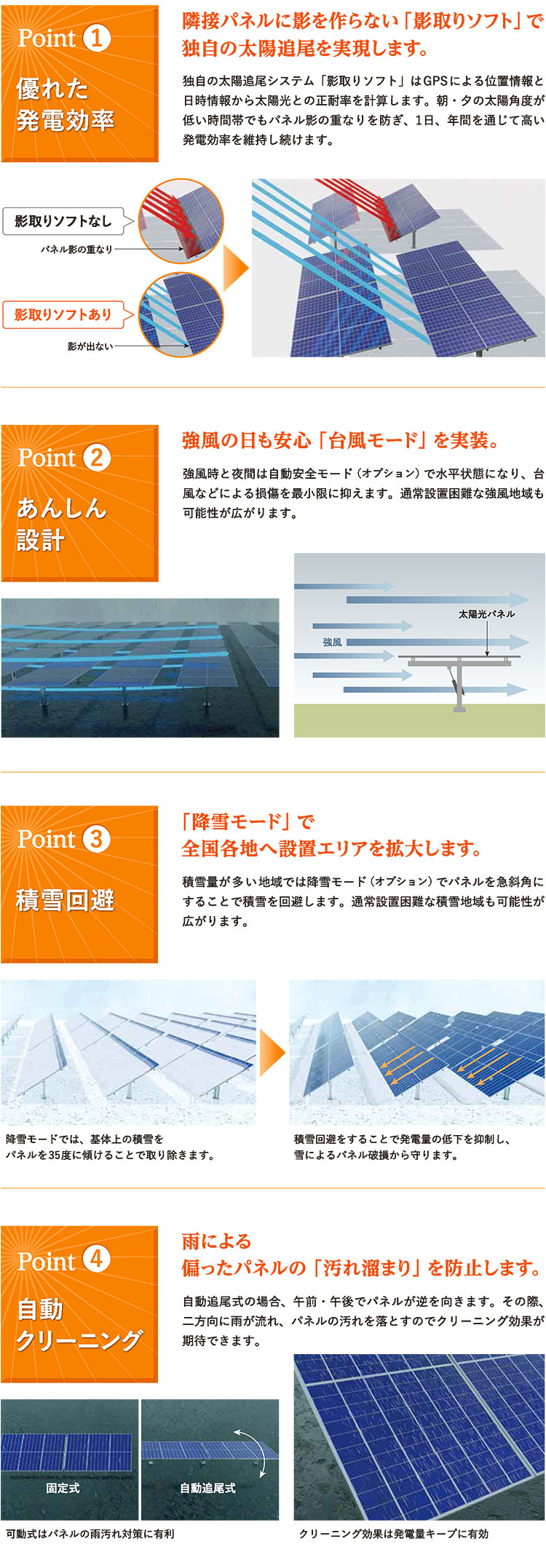
FIT単価の低下対策に「6連ルーバー式太陽光追尾架台」
固定型に比べて発電量20%増

仕様
|
構成 |
鋼製フレーム構造 (SS400相当/溶融亜鉛メッキおよびステンレス) |
|
|---|---|---|
|
重量 |
約200Kg (※PVパネル含まず) |
|
| 基準風速 |
38m/sec (※土地のn値、設置地上高さ及び積雪などの影響により変動があります) |
|
| PVパネル |
積載パネル6枚 (※下図は665W両面発電パネルの場合) PVパネルは固定用ボルト穴を使用せず、クランバーにて固定するので、どのメーカーのパネルも設計変更無しで搭載可能です。 |
|
| 駆動方式 |
電動リニア・アクチュエーター駆動 (ポテンションメータ・フィードバックによる位置決め方式) |
|
| 駆動電源 |
AC100V~240V(4A) ※制御ボックスへ電源に供給をお願いします。 |
|
| 制御方法 |
GPSによる日付/時間情報により影の影響を受けない角度を自動計算。 (1制御ボックスで16架台制御) ※15分に1回7分30秒後の太陽位置を計算して移動。 |
|
| 追尾範囲 |
±35度(±2度)・温度範囲-40度~+60度・安全装置:電流値による過負荷自動停止、ストロークエンドにリミットスイッチ内蔵(両端) |
|
※このホームページに掲載されているCGおよび写真はイメージです。
※このホームページに掲載されている製品の仕様、外観は改良のため予告なく変更になる可能性があります。
図面

特許製法により開発した追尾型
太陽は季節により位置が変わります。
太陽の動きに合わせて発電パネルを可動させる太陽光自動追尾架台です。
当製品は、季節や時間の太陽位置に合わせて季節軸を設定し、季節に応じた太陽光システムがより効率的に発電させます。この高効率で発電するシステム化によって、発電効率を上げ、かつ導入コストも軽減できます。

独自開発の追尾制御や一日軸・季節軸の動作範囲によって最大の発電量を実現。

資材・機材などの改良や高性能・高精度の小型装置を採用し、コンパクトで軽量。

低消費電力化の駆動方式や独自のフィードバック制御による自動運転の実用化。

超軽量化及び高発電効率・施工性アップかつ品質を確保した上で限界まで削減。

強度の弱い構造物の狭い屋根等に載せることが可能。
システム動作及び構成
特徴